



描述
相較于剛性機器人,柔性機器人展現出了其所不具備的優勢。柔性機器人具有不同的軟硬件體系結構:每個關節都配置力傳感器,并且底層控制體系結構由原來的位置控制,轉變為力和位置融合控制,使機器人兼具高精度位置控制和高動態力控制。
當前,柔性材料的軟機器人已廣泛應用于各個領域。在許多情況下,為了完成緊急任務(如救援),需要快速制造出適合的軟體機器人。現在,浙江大學工程學院教授鄒俊就基于剛性機器人仍存在的局限,開發出了一個真空驅動的柔性機器人。
一開始,研究人員提出一種剛柔結合的設計方案,即用一個真空驅動的柔性扭轉執行器(V-SPTA,Vacuum-Powered Soft Pneumatic Twisting Actuators)作為軟體機器人的 “柔性關節”。
真空動力軟氣動執行器(VSPAs)是一種有前景的新興應用技術,包括人造肌肉、可編程運動和柔性抓手。它們具有靈活的變形、清潔的供電、與用戶安全的交互等優點。
但是,在機器的構造方面,研究人員依然采用傳統的方式,以至于出現了在給軟體機器人吸氣的時候,機器人無法把運動完全分離開的情況。
在此基礎上,研究人員進一步改進。
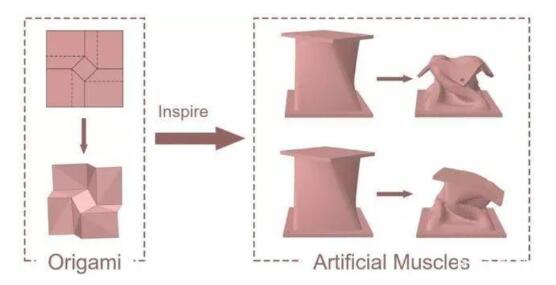
在進一步實驗設計中,研究人員通過模塊組合將復合運動解耦,實現了單個運動。并且,又模仿傳統折紙藝術千紙鶴的折疊運動,設計出一種流體驅動的全柔性人工肌肉。這種人工肌肉可以用于不同的軟機器人的快速重構,就像“積木”一樣。
此外,它可以通過直線運動、旋轉運動、彎曲運動,去實現所有的運動,為柔性材料軟機器人的制造提供了一種簡便、快速的方法,大大提高了柔性材料的利用率。
同時,折紙設計的應用有助于基于柔性材料的機器人的發展,并在由各種柔性材料如水凝膠、電活性聚合物,液態金屬等制成的軟體機器人中具有廣闊的應用前景。
顯然,基于柔性材料的軟式機器人在實現各種運動、操作精細物體、提供更安全的人機交互以及適應受限環境等方面展現了出了巨大的可能性,未來也將在更廣泛的場景中得到更多的應用。
責任編輯:YYX